Avèk kwasans rapid nan demann transpò wout, machin ki twò chaje yo poze gwo risk pou wout yo, pon yo, tinèl yo, ak sekirite trafik an jeneral. Metòd tradisyonèl pou kontwole twòp chaj yo, akòz enfòmasyon fragmenté, efikasite ki ba, ak repons ki ralanti, vin pi plis enkapab pou satisfè egzijans regilasyon modèn yo. Pou reponn a sa, konpayi nou an devlope...Sistèm Enfòmasyon Jesyon Kontwòl Surcharge Entelijan, itilize teknoloji enfòmasyon, rezo, ak teknoloji entelijan pou reyalize koleksyon done santralize, jesyon dinamik, konparezon an tan reyèl, analiz entelijan, ak pwosesis otomatik. Sistèm sa a bay otorite jesyon trafik yo zouti efikas ak egzak pou kontwole surcharge, asire sekirite wout ak dirabilite enfrastrikti.
Sistèm nou an fèt sou yon kad nasyonal, pou konstwi yon estrikti kontwòl ak sipèvizyon konplè, a plen tan, sou tout chèn nan, ak sou tout rejyon an. Li pèmèt koneksyon ak pataj done ant estasyon sous yo, wout fiks yo, kontwòl wout mobil yo, ak sant kontwòl santral nasyonal la, pou fòme yon modèl regilasyon konplè depi chajman sous la rive nan operasyon ak aplikasyon wout yo. Atravè siveyans teknolojik, kolaborasyon done, ak aplikasyon règleman an bouk fèmen, sistèm nan kontwole efektivman surcharge nan sous la, asire wout yo rete nan dire lavi sèvis yo, ankouraje operasyon machin reglemante ak peaj ki jis, epi pwoteje enfrastrikti transpò ak enterè nasyonal yo.
Sistèm jeneral la konpoze de kat gwo modil fonksyonèl: Sistèm Kontwòl Surchaj Estasyon Sous la, Sistèm Kontwòl Surchaj Wout Fiks la (gran wout + wout nasyonal, pwovens, minisipal ak konte), Sistèm Kontwòl Surchaj Wout Mobil la, ak Sistèm Jesyon Peaj la. Modil sa yo travay an kowòdinasyon pou kreye yon sistèm sipèvizyon konplè ki kouvri tout rezo wout la ak tout senaryo yo.
Pati Youn: Sistèm Kontwòl Surchaj Estasyon Sous
Objektif prensipal Sistèm Kontwòl Surchaj Estasyon Sous la se pou diminye oswa elimine machin ki twò chaje k ap kite estasyon orijin yo. Objektif prensipal yo enkli machin ki soti nan min, pò, ayewopò, pak lojistik, faktori ak konpayi transpò. Siveyans kontinyèl 24 sou 24, 7 jou sou 7, asire machin yo konfòm ak règleman chajman nan sous la.
1. Sistèm Pezaj Veyikil Dinamik Uit Platfòm
Nan sòti sit ki anba siveyans yo, yo deplwaye Sistèm Pezaj Dinamik Veyikil Uit Platfòm pou detekte machin ki twò chaje anvan yo antre nan wout piblik yo. Sistèm sa a gen ladan l:
Balans Veyikil Elektwonik Uit Platfòm– Itilize selil chaj ki gen gwo presizyon, rekonesans kantite aks ak distans, mezi dimansyon machin, ak separasyon optik raster pou detekte dinamikman pwa ak gwosè machin nan.
Sistèm Jesyon Pezaj San Moun– Li gen ladan l òdinatè endistriyèl, lojisyèl jesyon peze, kamera siveyans, ekran ekspozisyon LED, envit vokal, kabinèt kontwòl entelijan, ak sistèm rezo pou idantifye machin yo otomatikman, kolekte done, detèmine estati surcharge, epi jere liberasyon an.
Pwosesis Travay Operasyonèl: Veyikil yo antre nan zòn peze a apre yo fin chaje. Sistèm nan otomatikman mezire pwa ak dimansyon epi konpare yo ak limit chaj apwouve yo. Veyikil ki konfòm yo otomatikman lage, alòske machin ki twò chaje yo oblije dechaje jiskaske yo satisfè estanda yo. Sistèm nan entegre ak platfòm gouvènman rejyonal yo pou pèmèt pataj done ak sipèvizyon a distans, sa ki asire vizibilite an tan reyèl sou kontwòl surcharge sous la.
2. Sistèm peze machin abò
Pou reyalize plis sipèvizyon dinamik, machin yo ekipe ak Sistèm Pezaj Veyikil Abò, ki kapab siveye an tan reyèl chaj machin estatik ak dinamik yo. Sistèm nan gen ladan l lojisyèl peze abò, ekran enstriman entelijan, ak inite peze (tip distans lazè oswa kalib tansyon), sa ki pèmèt chofè yo wè chaj aktyèl la epi resevwa avètisman pandan chajman an. Machin ki twò chaje yo resevwa envitasyon pou yo dechaje, ak done yo telechaje an menm tan sou platfòm jesyon flòt ak sistèm gouvènman an, epi, si sa nesesè, jenere otomatikman avi oswa amann pou surcharge.
Sistèm nan itilize selil chaj sispansyon pou kontwole defòmasyon lam sous, aks, oswa sispansyon lè epi li aplike yon metodoloji "deteksyon-kalibrasyon-kalkile-aplike" an bouk fèmen pou konstwi modèl chaj. Algorit lojisyèl yo konpanse pou faktè anviwònman yo, sa ki asire presizyon mezi yo. Presizyon peze estatik la rive nan ±0.1% ~ ±0.5%, alòske presizyon peze endirèk la rive nan ±3% ~ ±5% anba kondisyon ideyal, ki apwopriye pou jesyon operasyonèl ak alèt risk.
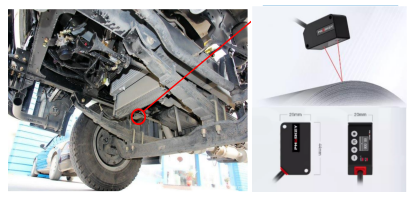
Sistèm Mezi Distans Lazè Defòmasyon Ankadreman Monte Sou Sispansyon

Deformasyon ankadreman monte sou sispansyonSelil chaj
Lè yo konbine Sistèm Peze Veyikil Dinamik Uit Platfòm lan ak Sistèm Peze Veyikil Abò a, machin yo ka fè oto-tcheke, flòt yo ka fè oto-enspekte, epi otorite yo ka sipèvize tout pwosesis la, sa ki kreye yon modèl jesyon kontwòl surcharge sous an tan reyèl ki konplètman entegre ki asire sekirite trafik ak estabilite enfrastrikti alontèm.
Dat piblikasyon: 9 Desanm 2025