I. Apèsi sou Sistèm nan
1. Kontèks Pwojè a
Nan dènye ane sa yo, transpò ilegal machin machandiz sou gran wout vin tounen yon pwoblèm grav ki mete sekirite trafik wout nasyonal la an danje. Li fè gran wout ak pon yo twò chaje, sa ki diminye lavi sèvis wout ak pon yo anpil; an menm tan, faktè sekirite machin yo diminye anpil, sa ki toujou lakòz aksidan trafik; li fasil tou pou lakòz konjesyon trafik ak polisyon anviwònman an.
Gouvènman nan tout nivo atravè peyi a kontinye ogmante efò yo pou kontwole transpò machin ki twò chaje sou gran wout yo e yo reyalize rezilta enpòtan gradyèl. Sepandan, akòz faktè sosyal ak ekonomik konplèks, sitiyasyon deteksyon surchaj nasyonal la toujou grav anpil, e danje kache rebondisman yo pa elimine; konsolidasyon rezilta gouvènans lan ak pwomosyon kontinyèl travay deteksyon surchaj la toujou anba gwo presyon. Se poutèt sa, gouvènans transpò machin ki twò chaje a se yon travay alontèm ak chak jou, ki dwe pèsevere. Li enpòtan pou entegre gouvènans travay ki twò chaje a nan yon mekanis alontèm. Li jwe tou yon wòl legal pou dekouraje machin ki twò chaje yo, epi li kapab tou elaji fonksyon li yo pou fè li tounen yon enspeksyon wout, kraze mantalite aksidantèl operasyon transpò ilegal yo, epi kontwole ak elimine divès operasyon transpò ilegal yo alè, tankou transpò twò chaje.
2. Entwodiksyon nan sistèm peze a
Prensip peze balans kamyon estatik la se pou pake tout machin yo sou platfòm peze a pou peze tout machin nan. Li gen yon presizyon peze ki wo epi li respekte estanda nasyonal ki klè. Sepandan, yon balans kamyon konvansyonèl ka sèlman jwenn pwa tout machin nan, men li pa ka jwenn pwa aks la. Li ka jije si tout machin nan twò chaje, men li pa ka jije si pwa aks la twò chaje. Li pa ka satisfè egzijans depatman administrasyon wout yo pou reyalize objektif pou jere transpò ki twò chaje.
Plan sa a konbine plizyè ane eksperyans konpayi nou an nan konsepsyon ak fabrikasyon ekipman deteksyon surchaj ak aplikasyon reyèl li nan divès rejyon nan peyi a, li etidye ak anpil atansyon itilizasyon divès ekipman deteksyon surchaj sou mache a, epi li konsidere an pwofondè bezwen espesifik depatman jesyon gran wout yo pou jesyon transpò surchaj. Li adopte teknoloji avanse ak lide konsepsyon inik pou devlope yon sistèm deteksyon pwa machin ak kalite aks dinamik ak gwo presizyon. Li ka peze tou de pwa aks ak pwa total, epi li ka distenge kalite aks. Presizyon pwa aks la kapab amelyore anpil tou.
2. Konpozisyon sistèm surcharge ak depasman limit
1. Karakteristik sistèm
Li ka peze machin k ap pase a ba vitès epi detèmine otomatikman si pwa machin nan oswa pwa aks la twò chaje;
Li ka detekte kantite aks, gwoup aks, pwa aks ak pwa machin nan;
Li ka fòme enfòmasyon konplè sou peze machin nan, ki gen ladan kalite aks, pwa aks, gwoup aks ak pwa total;
Li ka transmèt enfòmasyon sou peze nan òdinatè a atravè koòdone done a;
Pati santral sistèm nan adopte ekipman ki gen matirite ak serye, tout adopte yon konsepsyon modilè, fasil pou kenbe ak elaji, pou asire gwo fyab sistèm nan.
Lojisyèl sistèm lan gen matirite, li trè fyab, done yo konplè epi efikas, epi li ka pataje nèt, sa ki amelyore efikasite travay la efektivman epi elimine divès twou vid ki genyen nan jesyon an nan pi gwo limit.
2. Pwosesis sistèm lan
Yo mete kamyon an nan liy peze estasyon surcharge la, epi sistèm rekonesans plak machin nan idantifye nimewo plak machin nan;
Idantifyan kawotchou (aks) la distenge kantite aks yo, epi sistèm peze machin nan kòmanse peze, detèmine gwoup aks la, epi kalkile pwa aks la.
Lè tout machin yo pase nan separateur machin nan epi antre nan platfòm peze a, epi balans lan nan yon eta relativman balanse, yo anrejistre pwa total machin nan epi yo jwenn pwa aks la.
Sistèm peze a voye enfòmasyon peze a (nimewo plak machin nan, kantite aks, pwa aks, pwa total machin nan, elatriye) bay òdinatè deteksyon an. Òdinatè a detèmine si limit la depase epi li montre enfòmasyon deteksyon an tankou pwa machin nan, limit ki depase, ak pousantaj limit ki depase sou ekran an.
Apre machin nan fin fè operasyon ki enpòtan yo, pèsonèl gid machin nan lage machin ki pa gen twòp limit yo pou yo kite zòn deteksyon an dapre enfòmasyon ki sou ekran an, gide machin ki gen twòp limit yo pou yo antre nan zòn estasyon an pou yo ka trete yo, enprime fòm enspeksyon machin ki gen twòp limit la, epi fè operasyon chaje ki enpòtan yo;
3. Konpozisyon sistèm ak plan aranjman
3.1 Konpozisyon sistèm lan
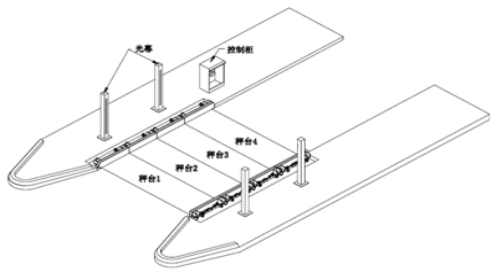
Sistèm deteksyon depase ak surcharge la konsiste de yon balans dinamik ZDG kat tab, yon enstriman kontwòl, yon separateur machin enfrawouj, yon platfòm peze pou idantifye aks wou, yon kabinè kontwòl (ekipman opsyonèl: sistèm rekonesans plak machin, sistèm ekspozisyon gwo ekran LED, sistèm èd vwa, sistèm gidans machin, òdinatè endistriyèl, enprimant tikè, ekipman pouvwa san enteripsyon UPS, lojisyèl sistèm deteksyon deteksyon depase ak surcharge, sistèm siveyans) ak lòt akseswa ak câbles.
3.2 Dyagram plan sistèm lan jan yo montre a:
Chemen travay la:
1) Machin yo antre nan liy lan nan sekans pandan y ap kenbe yon distans ki an sekirite, sa ki deklanche separateur machin enfrawouj la;
2) Chak aks machin nan pase nan platfòm peze milti-sifas la;
3) Kontwolè ekspozisyon an trete siyal peze ki soti nan detèktè platfòm peze a ak siyal detèktè wou a, separe aks la selon kondisyon lojik yo, epi jere sitiyasyon espesyal yo efektivman;
4) Dèyè machin nan kite platfòm peze milti-sifas la ak separateur machin enfrawouj la;
5) Kontwolè ekspozisyon an jije siyal fen machin nan nèt ale, baze sou siyal oklizyon ke separatè machin enfrawouj la detekte ak siyal peze ke detèktè peze a jwenn;
6) Kontwolè ekspozisyon an trete siyal peze a jwenn lè machin ki mansyone pi wo a ap pase nan platfòm peze a;
7) Kontwolè ekspozisyon an fòme yon enfòmasyon konplè sou peze tout machin nan, epi enfòmasyon konplè sou peze a gen ladan vitès machin nan, kalite aks, pwa aks, pwa gwoup aks, pwa total, elatriye;
8) Fini pwosesis peze yon machin epi tann peze pwochen machin nan.
9) Pandan tout pwosesis travay la, sistèm nan otomatikman jere divès sitiyasyon espesyal, tankou antre konplè ak sòti konplè, antre ak sòti repete, ak rete lontan sou platfòm peze a;
Sistèm nan ka otomatikman epi efektivman jere sitiyasyon machin sa a, epi peze machin sa a pa gen okenn efè sou presizyon done yo.

Dat piblikasyon: 20 Fevriye 2025